





IMU30S Inertial Measurement Unit

Product Features
Technical Specification
The main performance indicators
SN |
Parameters |
value |
Remark |
|
1 |
Gyro Dynamic Range(º/s) |
±500 |
|
|
2 |
Triaxial acceleration measurement range(g) |
±30 |
|
|
3 |
Gyro Bias repeatability(1σ,º/h) |
≤0.5 |
Room Temperature |
|
4 |
Gyro Bias Stability(10s,1σ,º/h) |
≤0.5 |
Room Temperature |
|
5 |
Gyro Bias Stability(10s,1σ,º/h) |
≤1 |
Changeable Temperature |
|
6 |
Triaxial accelerometer bias repeatability(1σ,º/h,mg) |
≤0.5 |
Room Temperature |
|
7 |
Triaxial accelerometer bias stability(10s,1σ,mg) |
≤0.5 |
Room Temperature |
|
8 |
Gyro scale factor nonlinearity, asymmetry(ppm) |
≤300 |
|
|
9 |
Gyro scale factor repeatability(ppm) |
≤300 |
|
|
10 |
Triaxial accelerometer scale factor nonlinearity, asymmetry(ppm) |
≤500 |
|
|
11 |
Triaxial accelerometer scale factor repeatability(ppm) |
≤500 |
|
|
12 |
Gyro Vibration (º/h) |
Before Vibration and in Vibration |
1 |
|
In Vibration and After Vibration |
|
|||
Before Vibration and After Vibration |
|
|||
13 |
Accelerometer(mg) |
Before Vibration and in Vibration |
1 |
|
In Vibration and After Vibration |
|
|||
Before Vibration and After Vibration |
|
|||
Physical Size and Power Supply
SN |
Parameters |
Unit |
Value |
1 |
Size |
DXH |
9.0cmx10.5cm |
2 |
Weight |
Grams |
850 |
3 |
Power |
W |
14 |
4 |
Temperature |
°C |
-45 to 71 |
5 |
Temperature Gradient |
°C/min |
2 |
6 |
Power Input |
VDC |
+28/0.5A |
7 |
Interface |
|
SDLC, RS422 |
8 |
Data Rates |
bps |
115200 |
9 |
Sync |
|
External or Internal |
Applications
● Weaponry
● Ground survey
● UAVs
● Mobile mapping
● Stabilized platforms
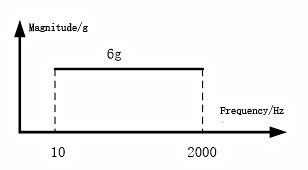
Figure 2. Scanning frequency vibration
Test Method: Each direction of vibration time: 5min, X, Y, Z each time, vibration power spectral density is shown in Figure 3.

Figure 3. Random vibration power spectral density graph (with vibration 6.06g)
The zero deviation requirement for the impact of before and after: ≤0.3 °/ h.
Dimensions
Dimensions: Φ (90±0.1) mm × (90±0.1) mm×(102 ± 0.5) mm, shown in Figure 1,
Installation pitch: (75±0.05) mm × (75±0.05) mm, mounting screw :M6.
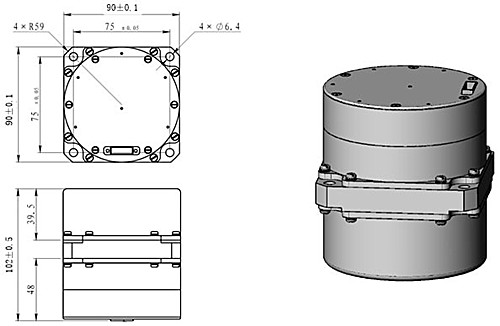
Figure 3 IMU30S Dimensions
What is an Inertial Measurement Unit (IMU)?
An IMU is made up of six complimentary sensors arrayed on three orthogonal axes, each axes has an accelerometer and gyroscope which allows an IMU to measure its precise relative movement in 3D space.
How do IMUs Work?
The accelerometers measure linear acceleration and the gyroscopes measure rotational acceleration. This information allows the IMU to measure its precise relative movement in 3D space. IMU measurements are also able to provide an angular solution about the three axes.
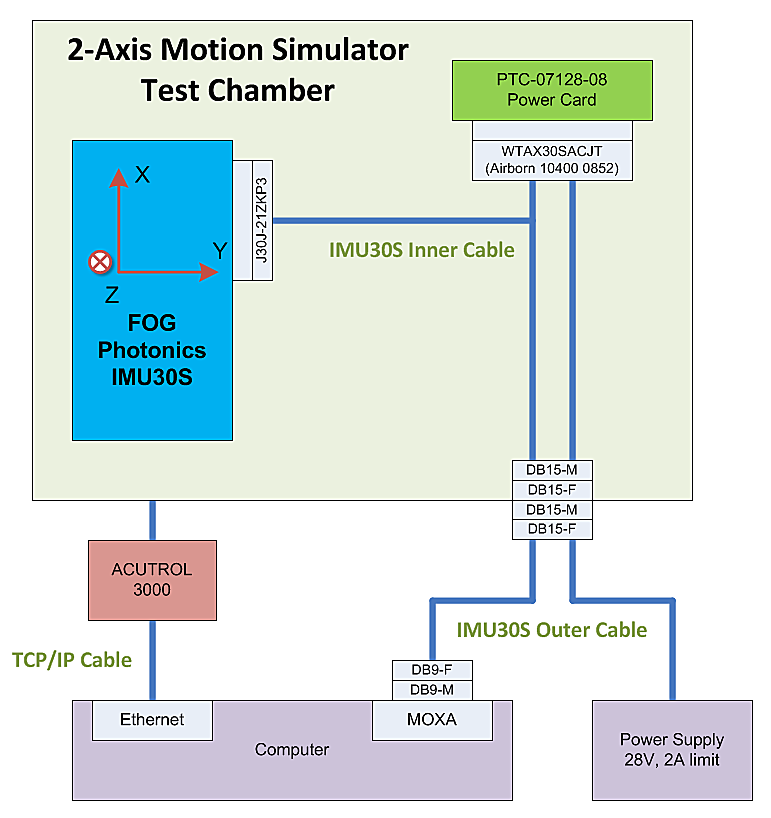
How to Installation?
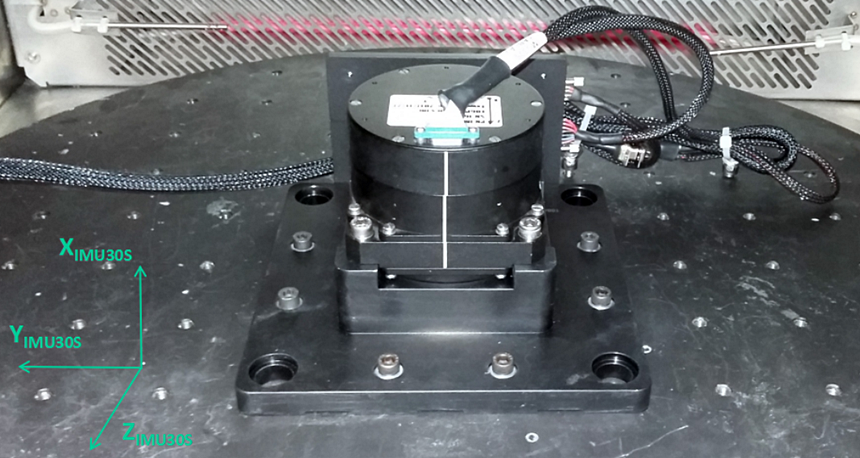
Testing Setup
| Gyro Parameters |
|
| Gyro Dynamic Range |
±500 °/s |
| Tri-Axial Axis Angular Velocity Scale Factor Nonlinearity, Asymmetry |
≤ 300 ppm (1σ) |
| Tri-Axial Axis Angular Velocity Scale Factor Repeatability |
≤ 300 ppm (1σ) |
| Tri-Axial Axis Angular Velocity Bias Stability at Room Temperature |
≤ 0.5 °/h (10s, 1σ) |
| Tri-Axial Axis Angular Velocity Room Temperature Bias Repeatability |
≤0.5 °/h (1σ) |
| Tri-Axial Axis Angular Velocity Bias Stability Full Temperature |
≤1 °/h (10s, 1σ) |
| Tri-Axial Axis Angular Velocity Random Walk |
≤ 0.05 °/√h |
| Bias in Vibration Towards Before Vibration and After Vibration |
≤ 1 °/h |
| Bias (before vibration and after vibration) |
≤ 0.3 °/h |
| Accelerometer Parameters |
|
| Tri-Axial Acceleration Measurement Range |
±30 g |
| Tri-Axial Accelerometer Scale Factor Repeatability |
≤ 300 ppm (1σ) |
| Tri-Axial Accelerometer Scale Factor Nonlinearity |
≤ 300 ppm (1σ) |
| Tri-Axial Axis Accelerometer Bias Repeatability |
≤ 0.5 mg (1σ) |
| Tri-Axial Accelerometer Bias Stability |
≤ 0.5 mg (1σ) |
| System Parameters |
|
| Start Time (Output data scheme must be stated explicitly, immediate data with a possibility of 1/2000 less accuracy) |
< 5 s |
| Store Temperature |
-55 °C .. +85 °C |
| Operation Temperature |
-45 °C .. +71 °C |
| Color |
Black Anodized |
| Weight |
1200 g |
| Interface |
J30J-21ZKP3 |
| Voltage |
18-36V |
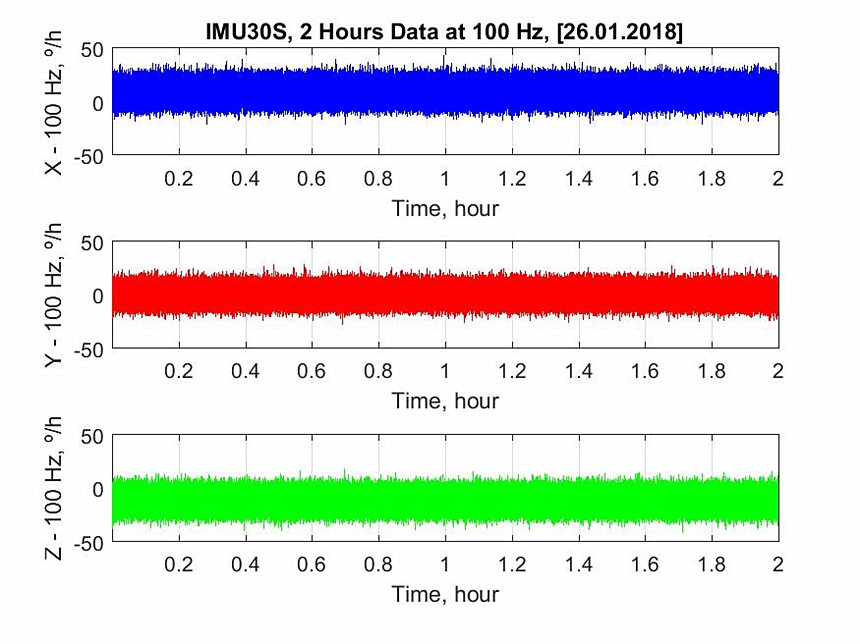
IMU30S Allan Variance Test - 1 2 Hours 100 Hz At Room Temperature
Strapdown Inertial Measurement Unit User Manual and maintenance instructions 
solid model of IMU30 
IMU30S Test Report
Related Products



© FOGphotonics, inc. | Company | Products | Technoloy | Contact us